One-Shot
 anipulation
Strategy Learning
anipulation
Strategy Learning
by Making Contact
 nalogies
nalogies
1Massachusetts Institute of Technology
2Tsinghua University
* Equal contribution. Work done while Yuyao Liu was a visiting student at MIT.
Accepted by ICRA 2025
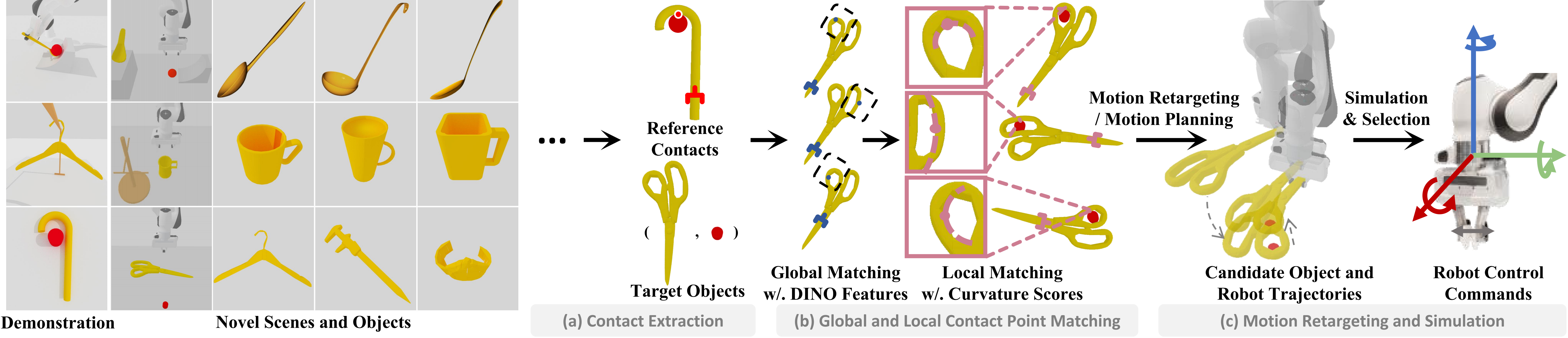

 Demonstration
Demonstration
 Demonstration
Demonstration
 Demonstration
Demonstration